Fast Bridgeless Pyramid Segmentation for Organized Point Clouds
Paper16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021)
Martin Madaras, Martin Stuchlík, Matúš Talčík
Abstract
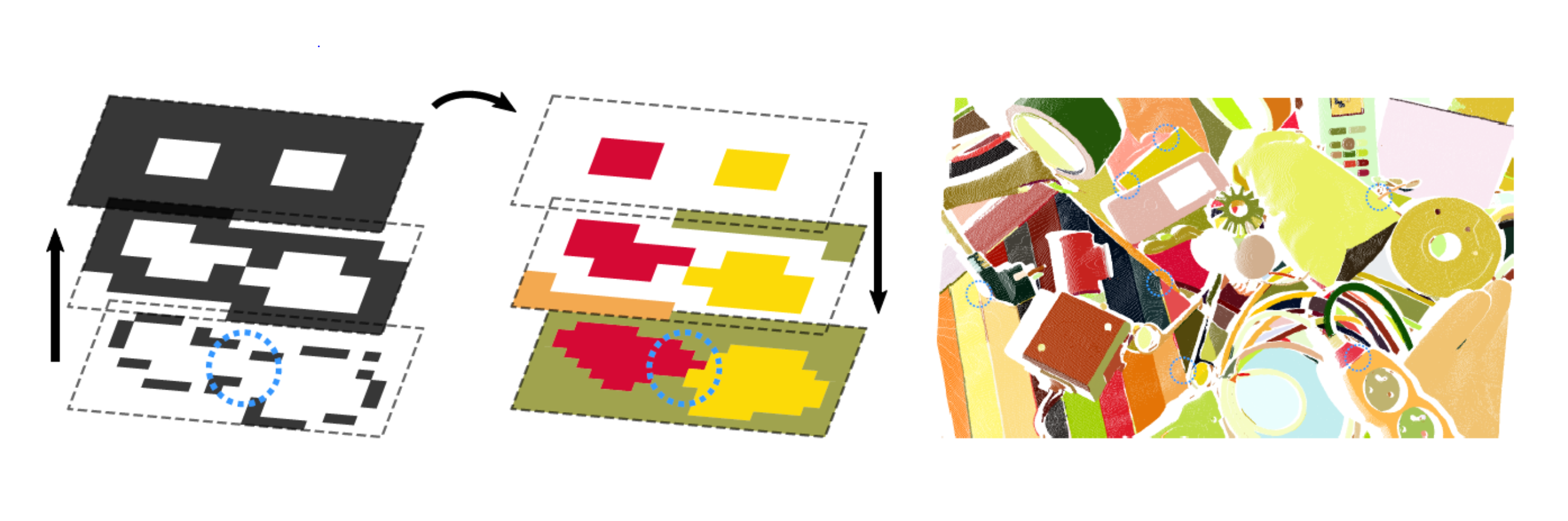
An intelligent automatic robotic system needs to understand the world as fast as possible. A common way to capture the world is to use a depth camera. The depth camera produces an organized point cloud that later needs to be processed to understand the scene. Usually, segmentation is one of the first preprocessing steps for the data processing pipeline. Our proposed pyramid segmentation is a simple, fast and lightweight splitand-merge method designed for depth cameras. The algorithm consists of two steps, edge detection and a hierarchical method for bridgeless labeling of connected components. The pyramid segmentation generates the seeds hierarchically, in a top-down manner, from the largest regions to the smallest ones. The neighboring areas around the seeds are filled in a parallel manner, by rendering axis-aligned line primitives, which makes the performance of the method fast. The hierarchical approach of labeling enables to connect neighboring segments without unnecessary bridges in a parallel way that can be efficiently implemented using CUDA.