Industrial Autonomy
We bridge the gap between raw hardware and intelligent action. Our focus is operational efficiency—transforming static warehouses and assembly lines into high-speed, self-correcting environments through real-time 3D perception and robotic logic.
Warehouse Autonomy
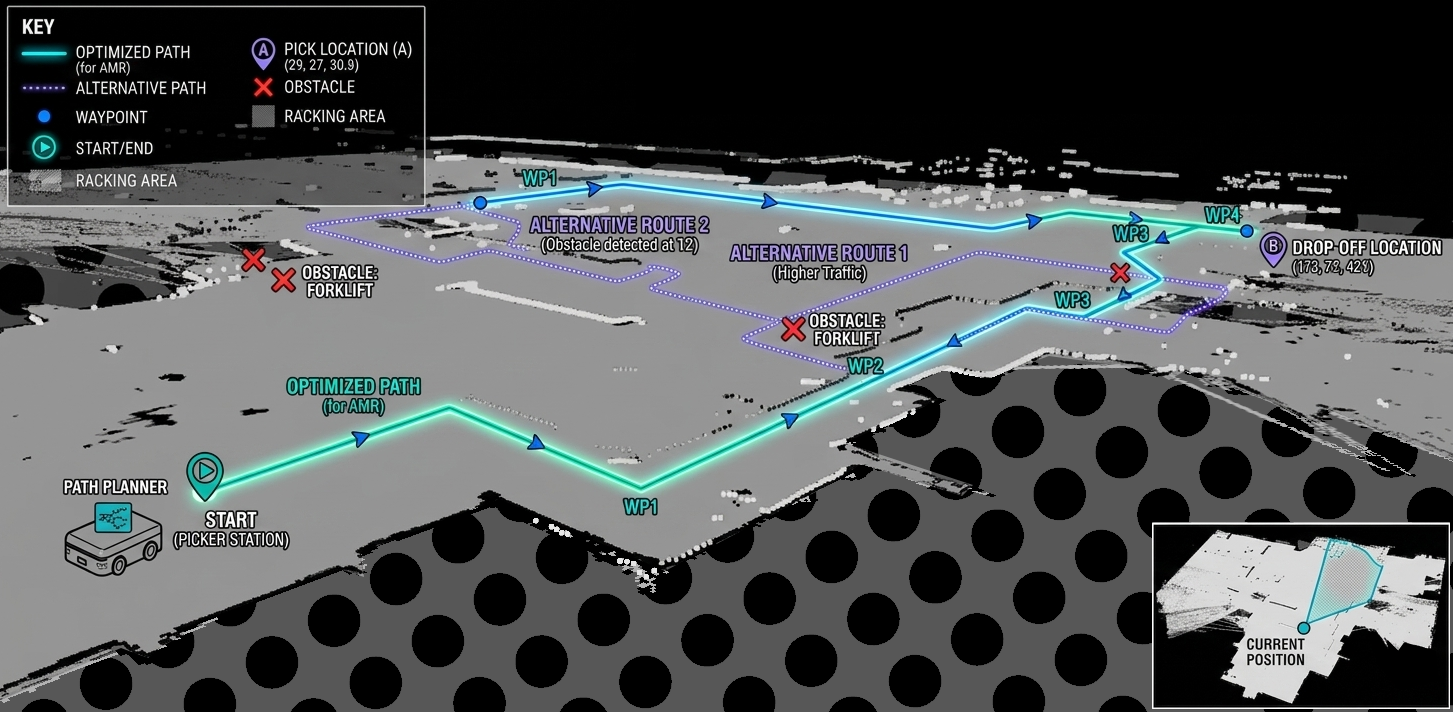
We work with teams developing autonomous vehicle navigation systems for warehouse and factory environments. Our solutions use algorithms like SLAM and visual odometry to navigate vehicles through the environment and avoid obstacles. We have worked with platforms such as ROS, Gazebo, and Unreal Engine to create digital twins that support both simulation and real-world testing.
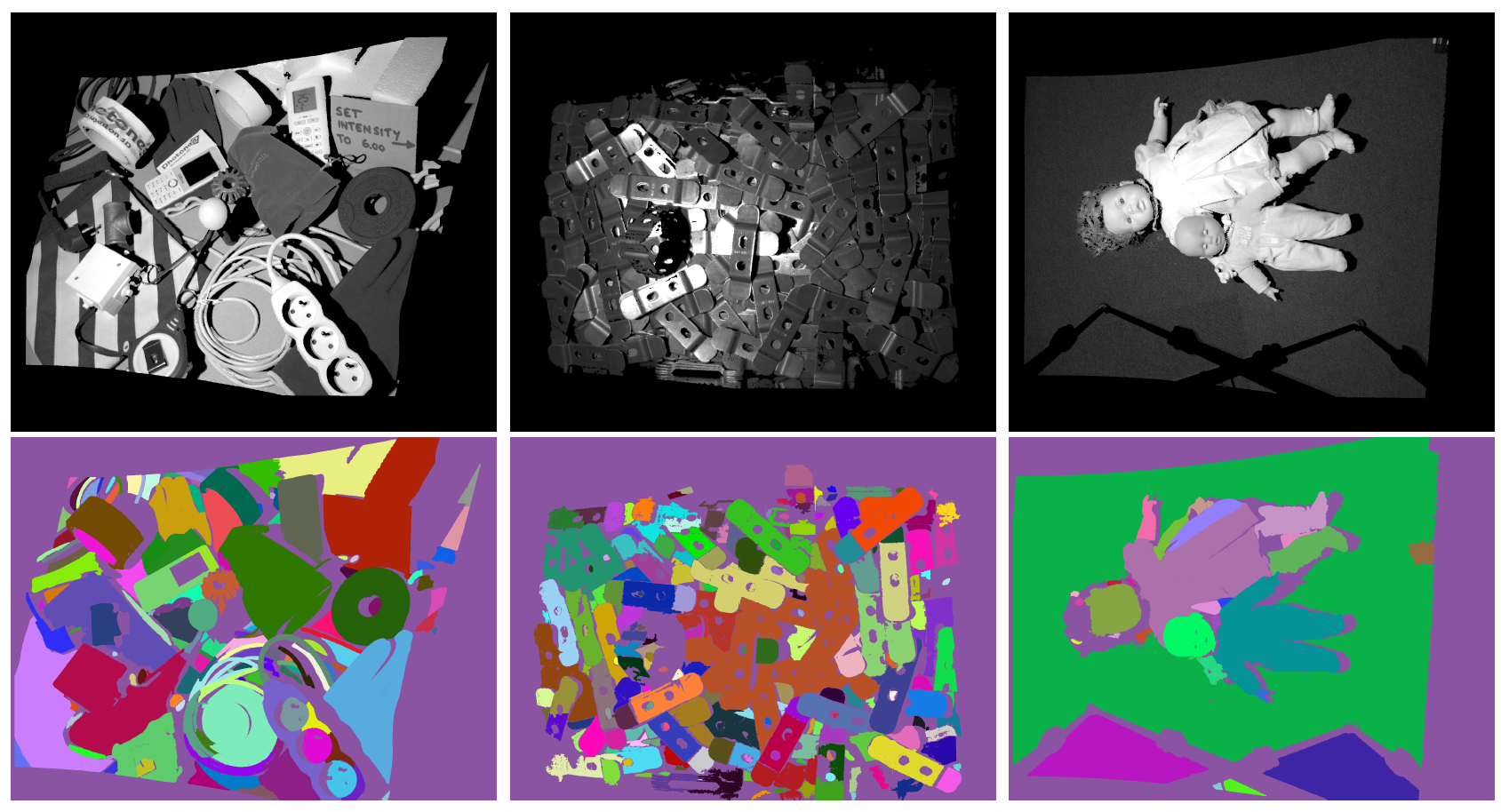
Our expertise includes bin pose estimation and layer detection for picking applications. We have experience with 2D cameras, structured-light scanners, and lidars. Because every application may have different requirements and challenges, we develop custom solutions that fit specific needs. Even when dealing with large scenes, we can handle multi-sensor calibration and scan fusion to achieve high accuracy and reliability.
Bin Inspection
We develop bin inspection systems for warehouse and factory environments, including high-speed conveyor lines. Our systems use advanced algorithms to detect and classify objects, including for quality control and defect detection. For our clients, we offer the design and construction of pipelines ranging from scene capture, noise filtering, and reconstruction, through object detection and pose estimation, to segmentation and object classification.
Model digitization & metrology
Our portfolio includes several applications and libraries for object digitization and metrology. We use algorithms for combining multiple scans into a single, high-quality surface, such as RANSAC and ICP, along with noise filtering and mesh reconstruction methods like Poisson reconstruction. We have experience with both point-cloud data and volumetric solutions, including large scenes that require real-time processing on the GPU.

Integration for Complete Solutions
We integrate our systems directly into hardware platforms, optimizing for performance and reliability. We design DevOps pipelines for continuous integration and deployment, ensuring that systems stay up to date and run smoothly.
Interested?
Apply for a free consultation with our experts by contacting us using the information below.